Lei Feng network (search "Lei Feng network" public number attention) by: Han Fengtao, author of this article, Yan Shi Technology (industrial robot supplier) product director.
First of all, let's take a look at the simple history of collaborative robots. To accurately define a collaborative robot, first look at two nouns:
Collaborative Workspace refers to the area where robots and humans can work simultaneously. The following is the definition in ISO 10218-2: workspace within the safeguarded space where the robot and a human can perform tasks simultaneously.
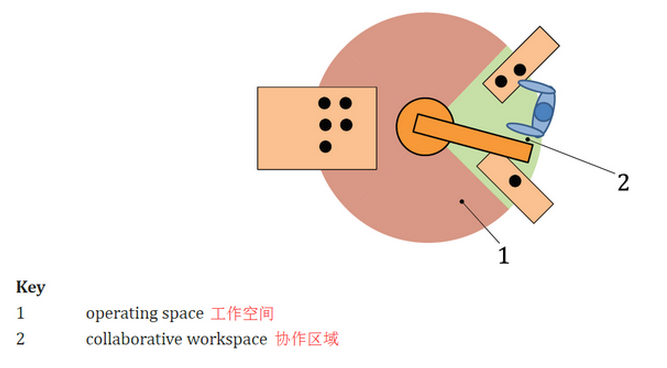
Collaborative Robots , which are robots designed to interact directly with people within a collaboration area, are defined in ISO 10218-2: robot designed for direct interaction with a human within a focused collaborative workspace.
Small and medium-sized enterprises (SMEs) are a very important customer group of collaborative robots, and the rise of collaborative robots is also inseparable with SMEs.
The SME Project ( http://) started in 2005 and is funded by the EU FP6 (Framework Programme 6) project. Participating companies include ABB, KUKA, Reis, Comau, Güdel, etc. The purpose of the SME Project ( http://) is to search for prevention of offshore workforce (offshore). Output to low labor cost countries. The main argument is that if robotic technology is used to increase the level of labor in SMEs, reduce costs, and increase competitiveness, labor outsourcing can be avoided (jobs are left in the country). Therefore, the initial market for co-bots is SMEs.
In the same year, Esben Østergaard, Kasper Støy and Kristian Kassow founded the Universal Robot while doing research together at the University of Southern Denmark. Now CEO Esben Østergaard was an assistant professor at the University of Southern Denmark. Three people discovered the new needs of robots for SMEs (also with At that time, the Danish government was leading a robot program.) In 2009, it launched the first collaborative robot UR5.
Most of the collaborative robots before the UR5 were rebuilt on the basis of conventional robots. The UR5 was the first robot to be developed at the request of a collaborative robot from the beginning of product design.
Shortly thereafter (in 2008), Rodney Brooks founded Rethink, whose original purpose was also to help US-based SMEs increase productivity, reduce costs, and reduce offshoring. The initial launch of the two-armed Baxter was not very successful and slowly began to fall behind UR. The new single-arm Sawyer robot was launched last fall and how market acceptance remains to be seen.
After UR and Rethink, a large number of newly-created cooperative robot companies have grown up. The number of collaborative products on the market has also increased. The concept of collaborative robots has gradually been recognized and accepted by everyone.
The rise of collaborative robots means that traditional robots must have some degree of inadequacy or they cannot adapt to new market demands.
To sum up, there are three main points:
1, the cost of traditional robot deployment
In fact, relatively speaking, the price of industrial robots itself is not high. Robots used in mainstream applications have a price range of ¥10w~$40w depending on the load capacity. In general, the service life of the next robot is 5-8 years, which is not expensive as a relatively high-end industrial device.
There are two reasons why traditional robots are expensive to deploy (install robots to the factory and operate normally):
The current industrial robots are mainly responsible for the repetitive work in the factory, which depends on its very high repeatability (the ability to repeatedly reach certain fixed positions in the space, generally the robot can be less than 0.02mm), and rely on a fixed external environment. . In order to ensure this, in addition to the design requirements of the robot itself, the product to be processed needs to be placed in a fixed position so that the robot can accurately take or perform an operation each time in the same place. For a modern and complex assembly line operation, designing these fixed external environments for each process using a robot on the entire production line requires a lot of resources, occupies a large amount of valuable workshop area, and takes several months to implement.
Robots are difficult to use, and only trained professionals can use robots to complete the configuration, programming, and maintenance work. Ordinary users rarely have such capabilities.
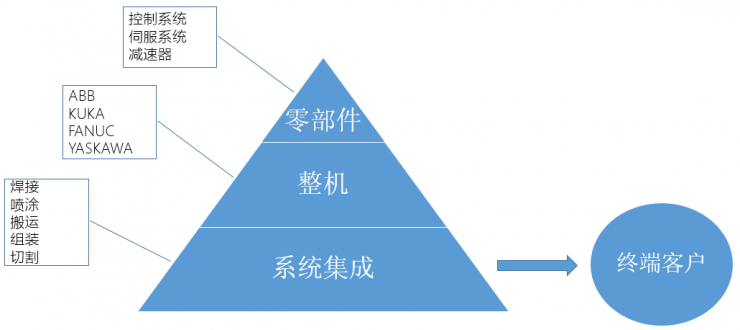
It is a systematic project to transform a line formerly dominated by worker operations into a production line consisting primarily of robots and automation equipment. Most terminal plant customers do not have such capabilities and therefore need a third party role to complete. In this part of the work, the third-party system integrator (System Integrator, a similar division of labor in the computer industry, does essentially the same thing), to complete the final deployment of the robot based on the actual situation at the customer site. .
The work of system integrators includes at least:
Production line automation reform program (process, equipment layout, staffing, etc.)
Design, manufacture and installation of robot peripheral support equipment
Robot programming and debugging that meets process requirements
Customer Technical Team Training
And follow-up after-sale maintenance work
According to statistics from many industry organizations and seniors, the entire robot deployment/integration application cost is about 3 to 4 times the robot's selling price. In recent years, with the rapid expansion of domestic integrators, competition has become more intense and the overall price has declined, but it is also basically 2 to 3 times.
Taking the common arc welding workstation as an example, the price of purchasing an imported brand arc welding robot is about 11~15w, but after the system integrator, the overall quotation will not be less than 30W, and individual exaggeration can even Report to 100w. In the relatively high wages of the Yangtze River Delta and the Pearl River Delta region, a skilled welder earns about 5k~7k, 1 robot replaces 1~2 workers, and the ROI will not be less than 2 years. Many SME owners will Choose hesitation and wait and see.
If more robots are used, in most cases, the original production line needs to be reconstructed or even reconstructed. Not only does it require a huge investment, but it may also involve a suspension of production and transformation. This is also why many plants are not on the robot. one.
In addition, because most of the equipment on each production line (end tools, non-standard machinery, control processes, etc.) are designed for specific products, if there is a change in production requirements in the middle, there is a high probability that the previous production line The inability to directly meet the demand for new product production involves the redesign and deployment of robotic systems. This part of the workload is sometimes close to first deployment.
In short, individual robots cannot be used directly on the factory's production line, but also require support from many peripheral devices. Although the robot itself is a highly flexible and highly flexible device, the entire production line is not, and once the production line changes are involved, the cost is high.
2, the traditional robot can not meet the needs of SMEs
SMEs are currently the main customers of the emerging robot market. Currently, traditional industrial robots cannot meet the needs of SMEs.
The target market for traditional industrial robots is a company that can conduct large-scale production.
Mass production is the most popular form of capitalist production in the 20th century. Its main features are the decomposition of production processes, assembly of assembly lines, standardized parts and components, mass production, and mechanical repetitive labor.
Companies that are capable of large-scale production are relatively insensitive to the high deployment costs of robotic systems because, after the product is finalized, the production line can be changed without major changes, and robots do not need to be reprogrammed or redeployed. , It can maximize the use of the characteristics of robot standardization and high efficiency to maximize the investment value.
The automotive industry is a typical example of large-scale production. The world's first industrial robot is also deployed in the General Motors plant and is responsible for the handling of stamped parts. Today, the automotive industry still accounts for more than 40% of global robot shipments.

A new car will generally go through 3 to 6 years from launch to exit. During this period, even if there is a change, the appearance and interior trimming will be fine-tuned. These changes will not generally affect the work of the robot (body welding, painting, and main parts handling), and therefore it is basically not the entire life cycle of the robot. Need to make changes to the completed production line or to redeploy the robot, only need to maintain the normal, can play the advantages of the robot, to avoid its shortcomings.
The SMEs are different. Their products are generally characterized by small batches, customization, and short-term cycles. They do not have much money to make large-scale transformations of the production line and are more sensitive to the ROI of the product.
This requires robots to have low overall cost, rapid deployment/redeployability, and simple to use methods, and these are difficult to satisfy with traditional robots.
In addition, in some emerging industries of robotic applications, even large companies face the same problems as SMEs, and the 3C (Computer, Communication, and Consumer Electronics) industry is a typical example of this.
In the 3C market, the replacement of mainstream products such as mobile phones, tablets, and wearable devices is very fast. Basically, the life cycle is only 1 to 2 years, and short or even only a few months. If traditional robots are used and large amounts of resources are invested, a production line that takes months to build may not even recover the fraction of costs, and the products produced should be delisted. It is unacceptable to re-engineer the production line and invest huge resources.
In addition to capital investment, the 3C industry is more concerned with time in many cases. The common robot automation program takes from one month to several months, but 3C products cannot wait for such a long time in every generation. Apple said over there that "the shell of the iPhone 7 will begin to be produced next month." It is obviously unrealistic for you to say "wait for me to renovate the production line in the next month." In these cases, people are still reliable and trained for 3 days. Standing immediately.
3, unable to meet the needs of emerging collaborative markets
Industrial robots have always been a model of high-precision, high-speed automation equipment. However, due to historical and technical reasons, safety when people are with us is not the focus of robot development. Therefore, for security reasons in most factories, Fences are generally used to isolate robots and personnel.

Fortunately for most of the work previously performed by robots, human involvement was not required and robots could be completed independently.
However, with the increase in labor costs, many other industries that had previously not used robots or rarely used robots began to seek solutions for robotic automation, such as the aforementioned 3C industry, as well as medicine, food, and logistics industries.
The characteristics of these emerging industries are many types of products, small volume, and high flexibility/flexibility requirements for operators. It is difficult for existing robots to provide satisfactory solutions with cost controllability. What should we do?
Robots can't do it. People can add it. We're going to get people together (don't think about it).
It is the responsibility of humans to perform procedures that require flexibility, touch, and flexibility, and robots use their fast and accurate features to perform repetitive tasks.
For example, if the keyboard is assembled, the robot can put the keycap in place, and the person can perform the work of snapping; for example, assembling the mobile phone/computer, the robot is responsible for putting the main parts and screws in a suitable position, and the person responsible for installing the cable, and the card. Buckle, screw work.
However, if the two are to cooperate, it would be too inconvenient to have a fence in the middle. In order to interact with the robots, they must first pass through the security gates. The overall efficiency is not as high as if they were used alone. This time requires some additional technology to ensure that robots and humans can safely work in the same area, without the need for barriers that block things in the middle, that is, require the robot to have the characteristics of safe collaboration.
The robots of major robot manufacturers are equipped with their own safety technologies, such as ABB's SafeMove, Fanuc's DCS, and KUKA's KUKA.safe, but their safety functions are still relatively primitive, such as replacing physical fences with virtual fences, inspections, and inspections. It stops automatically when someone approaches, and it is still not a complete collaborative security technology.
What is the difference between a collaborative robot and a traditional robot?In essence, there is no big difference between collaborative robots and traditional robots. Only industrial robot products based on different design concepts are produced. In the early stages of the development of collaborative robots, many were transformed from traditional robots.
If you have to look for differences, the first difference is that the target markets that these two types of robots are facing are not the same . This has been explained before and will not be repeated.
The second difference is that the objects they replace are not the same. The automation of traditional robots is mainly used to replace production lines with production lines. Robots are used as part of the entire production line and are difficult to separate out. If a certain part of the robot is broken, the whole production line is not designed without a backup copy. May have to stop work. The independence of the cooperative robot is very strong. It replaces a single person. The two can be interchangeable. A collaborative robot is broken, and it is better to move away and find someone to replace it. The flexibility of the entire production process is very high.
Having said so much is all about the advantages. Since cooperative robots are so good, can they replace traditional robots?
Of course not. Cooperative robots are just a very important subdivision in the industrial robot industry chain. They have their own unique advantages, but their disadvantages are also obvious:
In order to control the force and the collision ability, the cooperative robot runs slowly, usually only one third to one half of the traditional robot;
In order to reduce the kinetic energy when the robot moves, the cooperative robot is generally lighter in weight and relatively simple in structure. This results in a lack of rigidity of the entire robot, and the positioning accuracy is one order of magnitude worse than that of a conventional robot.
Low weight, low energy requirements, resulting in a small collaborative robot body, the load is generally less than 10kg, the scope of work is only with the human arm, and can not be used in many occasions.
Using Rethink Baxter's slogan, the target application of collaborative robots can be summarized as:
Human class,human-scale task in a human environment.
Collaborative robots will eventually become a transitional concept. With the development of technology, all robots in the future should have the characteristics of working together safely with humans.
Intrinsic safety should be an essential and basic feature of an ideal robot.
Just as we no longer distinguish between black-and-white television and color television, they are collectively referred to as television. They no longer distinguish functional and smart machines and are collectively referred to as mobile phones. All future robots will no longer distinguish between collaboration and non-cooperation. They are collectively referred to as robots.
Kara offers a wide range of illuminated and non-illuminated Rocker Switches.Ranging from 1 to 6 poles,4VA to 30 amp,with many styles of colors and functions,especially the switches with High-Current used very widely in the welding machines. Certifications include UL, CSA, TUV, CE, and more. Kara Rocker Switches include the KR1-Series abd KR2- Series based on different size of the panel cut-out.

Rocker Switch,Waterproof Rocker Switch,Rocker Switch 3 Pin,Rocker Switch 4 Pin
Ningbo Kara Electronic Co.,Ltd. , https://www.kara-switch.com