Design of Automobile Power Steering Control System Based on LabVIEW
introduction
Automobile power steering systems have gone through the mainstream stage of mechanical power steering, hydraulic power steering, and electronically controlled hydraulic power steering. At present, the electric power steering system (EPS) is one of the hot topics in the field of automotive engineering. The main content of the research is the control rules of the EPS system and the design of the hardware controller. The electric power steering system has the characteristics of few parts, simple structure, easy installation and maintenance, etc. It realizes power steering through the motor-controlled torque mechanism. The EPS control system can adjust and control the assist (or damping) state of the motor according to road conditions and vehicle conditions, greatly improving the steering comfort of driving. LabVIEW has good application prospects in the field of automotive electronics because of its outstanding advantages.
EPS composition and working principle
Electric power steering is to add a motor as a power source on the basis of an artificial mechanical system and replace hydraulic power steering with electric power. Electric power is controlled by the electrical control of the motor. In order to analyze the quality of the motor drive system,
And to detect the working status of the system, there must be a system testing tool to reflect the working status of the system. The virtual test system based on LabVIEW can complete the comprehensive monitoring of the electric power steering system. This is also the ultimate goal of this study.
The automotive electric power steering system based on LabVIEW is mainly composed of the following parts (see Figure 1): electronic control unit (ECU), vehicle speed sensor and torque sensor, servo motor, reduction mechanism and steering column assembly, program port and computer, etc. . Among them, the key is the electronic control unit, signal acquisition and conditioning circuit and computer virtual instrument, which largely determines the control effect of the electric power steering system.
The operation process of the EPS system is: when the car is in a starting or low-speed driving state, the steering wheel is steered, and the torque sensor installed on the steering column continuously detects the torque acting on the torsion bar of the steering column, and inputs this signal and the vehicle speed signal simultaneously The electronic controller and the signal acquisition and conditioning circuit, the ECU processor performs calculation processing on the input signal to determine the magnitude and direction of the assisting torque, thereby controlling the current and steering of the motor. The motor transmits the torque to the traction front wheel steering through the clutch and the reduction mechanism The tie rods ultimately provide auxiliary steering force for the driver. At the same time, after the signal conditioning, the torque signal T and the current signal I are input into the computer's LabVIEW virtual instrument control program through RS-232 serial port communication mode to conduct a comprehensive system performance test.
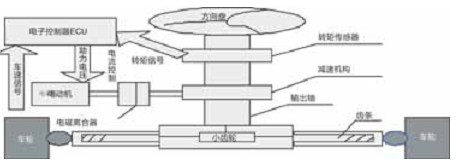
Figure 1 Schematic diagram of automobile power steering system
system design
Program module diagram
The automobile power steering system is mainly divided into three modules: the input signal acquisition module, the electronic control unit ECU module and the output actuator module (see Figure 2).
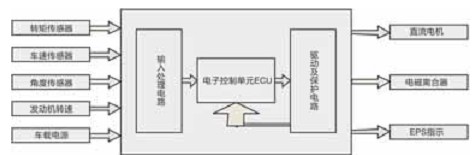
Figure 2 Design block diagram of automobile power steering system
This system uses a self-made basic input and output system to simulate the electric power steering device (EPS). The speed of the vehicle is simulated by the pulse generated by the basic input and output system. The pulse frequency can be simulated by the potentiometer fixed on the accelerator pedal to simulate the actual working conditions. Adjust. When the vehicle speed is relatively fast, the frequency of the pulse is large; when the vehicle speed is relatively slow, the frequency of the pulse is small. The input of other sensors is simulated by the output voltage of the basic input-output system, which can be adjusted by a potentiometer.
System flow chart
The system is designed based on LabVIEW. The main running sequence and loop structure are composed of while and case structures in LabVIEW programming. The specific program flow chart is shown in Figure 3.
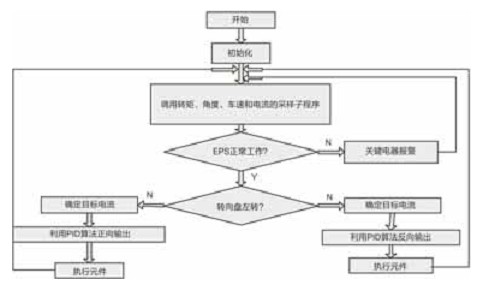
Figure 3 Program flow chart of automobile power steering system
2.3 System interface: it is divided into four parts: main interface, system establishment, parameter setting and performance test, as shown in Figure 4. When the main interface is running, there will be user login and user information registration, as shown in Figure 5; then enter the establishment of the system, including the car's model and other data; followed by the test data settings, including sampling frequency, speed, torque Upper alarm limit and display format of current and voltage.
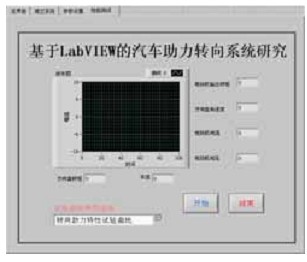
Figure 4 The main interface of automobile power steering system test based on LabVIEW

Figure 5 LabVIEW-based vehicle power steering system program landing interface
Conclusion
This paper uses sensor technology, computer control technology and virtual instrument technology to research and develop a virtual test system for automotive electric power steering performance based on LabVIEW. The system has friendly man-machine interface, stable and reliable operation, and its use greatly shortens the test time and improves the work. Efficiency can meet the testing requirements of modern production.
Neckband Earphones,Neck Earphones,Best Neckband Earphones,Wireless Neckband Earphones
Dongguang Vowsound Electronics Co., Ltd. , https://www.vowsound.com